
Data-driven Controls of a Flapping Wing UAV
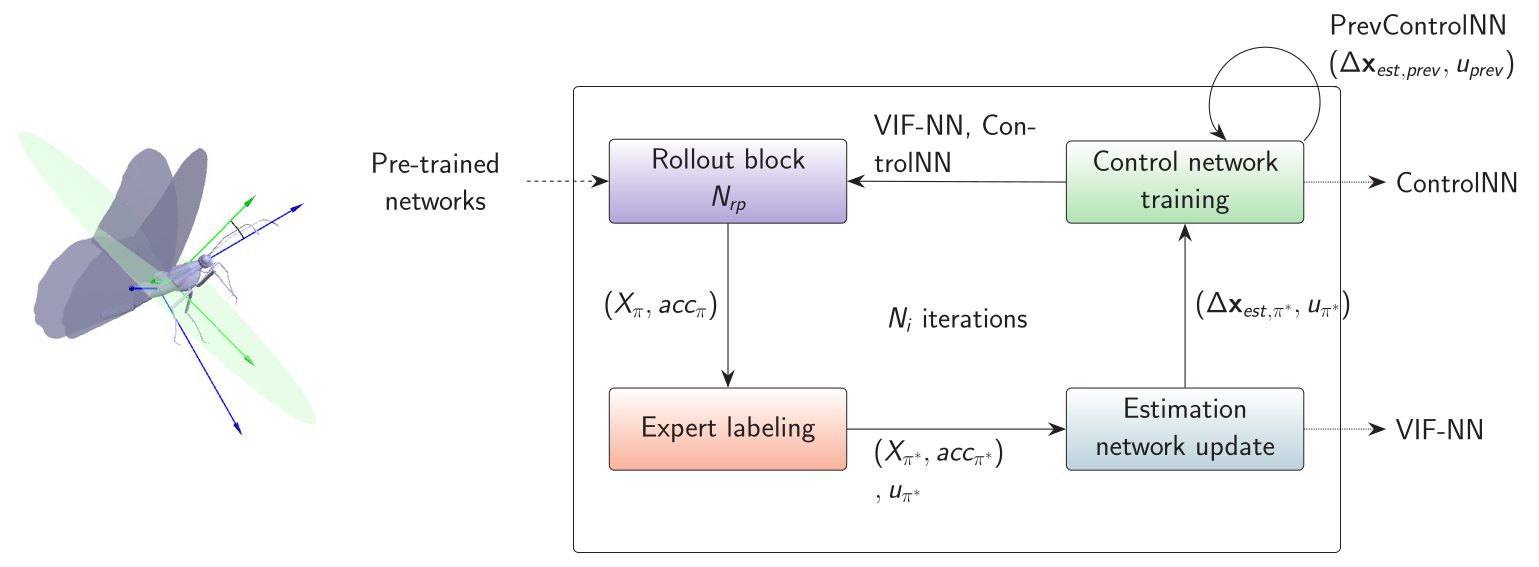
This post is about my PhD thesis on the dynamical modeling, stability analysis, optimal controls, and data-driven control policies for a flapping wing unmanned aerial vehicle, inspired by Monarch butterflies.