Ship-Relative UAV Pose Estimation with 3D LiDAR
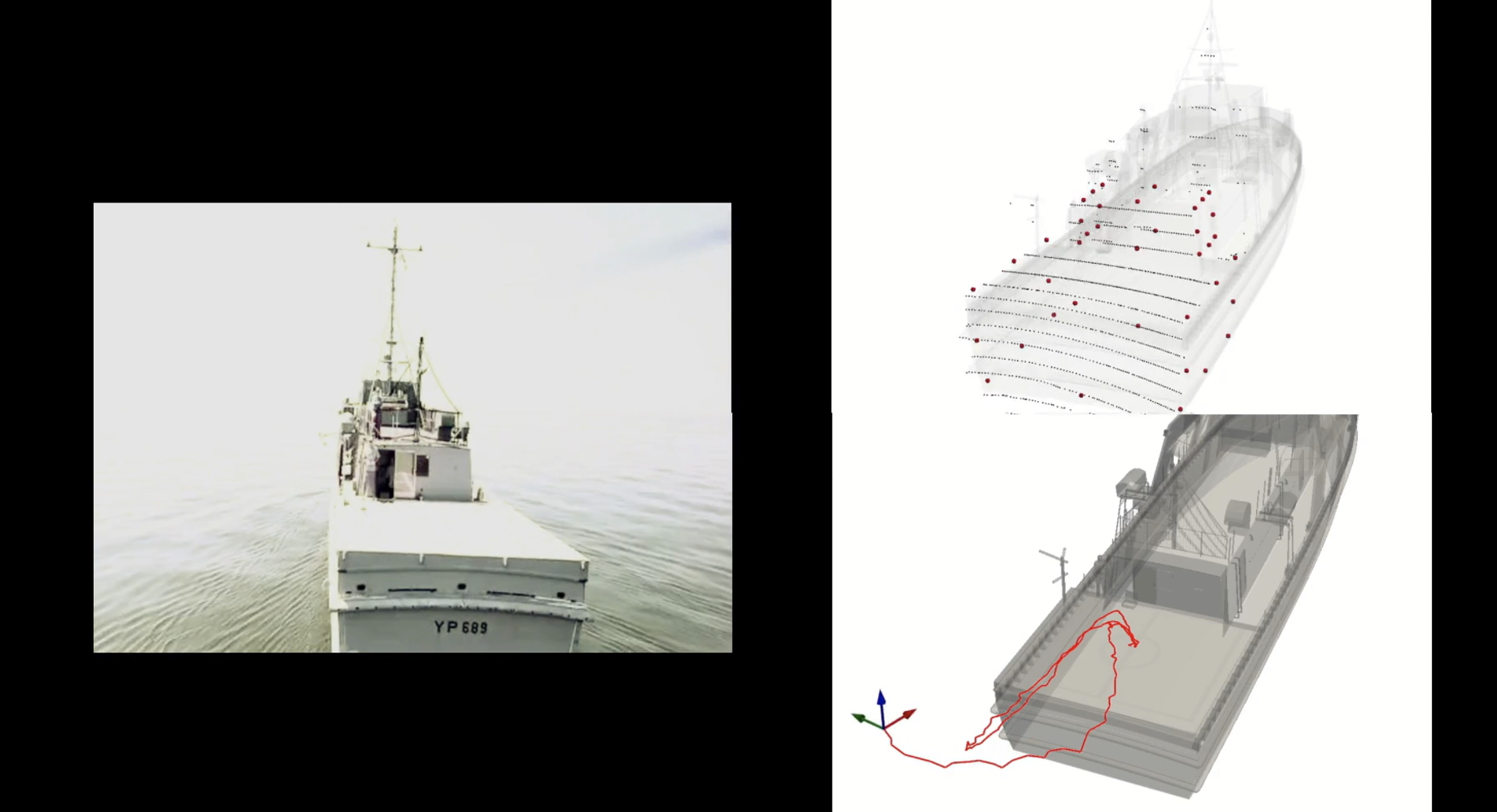
This post discusses my master's thesis research on transformer-based pose estimation for UAVs operating in GPS-denied maritime environments using 3D LiDAR.
Here, you’ll discover the latest posts that explore new insights, creative projects, and unique perspectives on the world. Dive in, explore, and uncover something new with every read.
This post discusses my master's thesis research on transformer-based pose estimation for UAVs operating in GPS-denied maritime environments using 3D LiDAR.
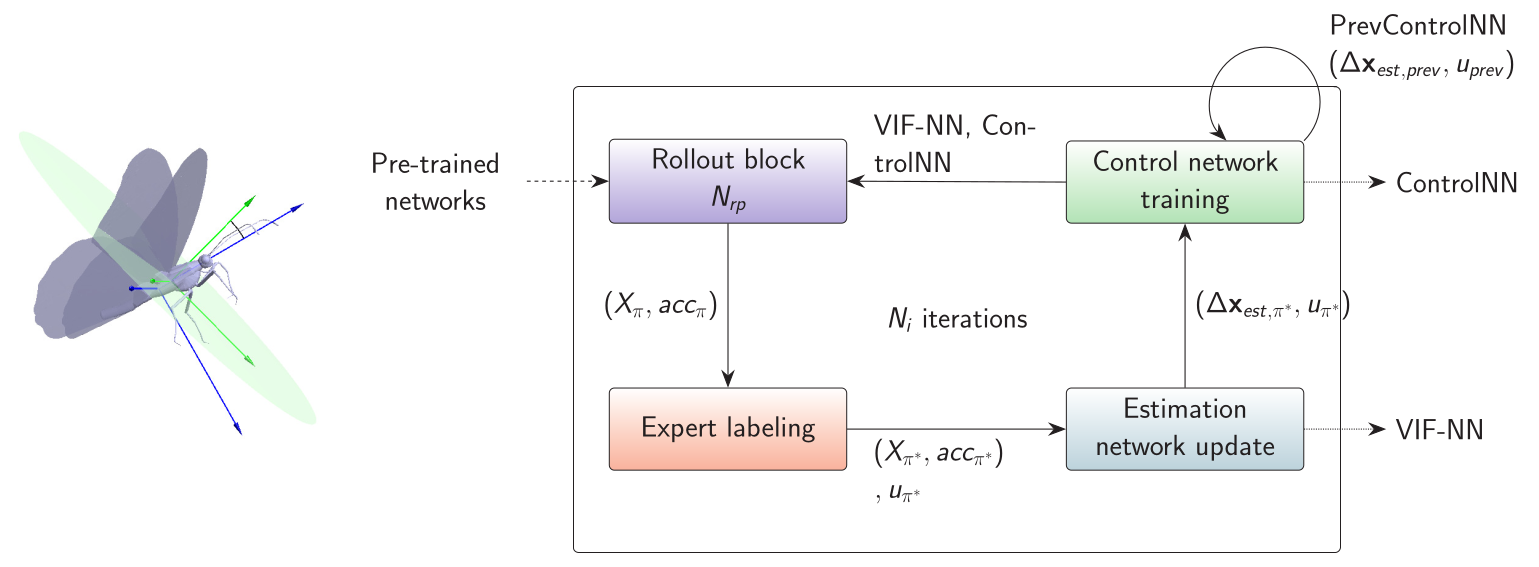
This post is about my PhD thesis on the dynamical modeling, stability analysis, optimal controls, and data-driven control policies for a flapping wing unmanned aerial vehicle, inspired by Monarch butterflies.
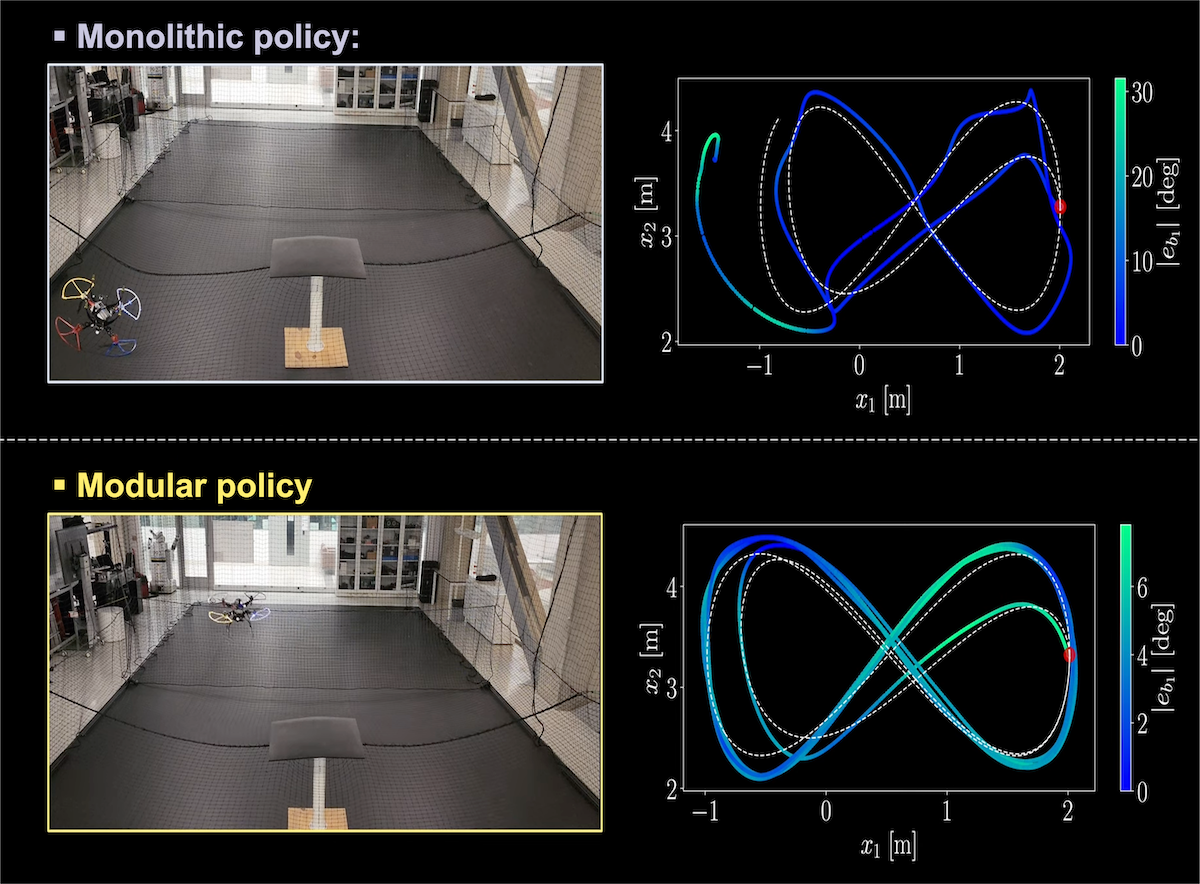
This study addresses the limitations of traditional RL approaches for quadrotor control by decomposing the quadrotor dynamics into translational and yaw subsystems, resulting in more efficient training and enhanced yaw control performance.